For a few projects in the past, I had to communicate data bidirectionally via sound. It involved, for example, hooking up a microcontroller to an iPod Touch (running SuperCollider) so that the device could read sensors and/or control LEDs. One successful method was to do Frequency-shift keying. See /f0blog/soft-modem/ for another blog entry on that.
I've published FSK Pure Data code for that before, and also some SuperCollider code for generating/encoding FSK, but never the decoding part I think.
So below is some old code I've cleaned up a bit. It just demonstrates sending audio via internal SuperCollider busses at a very low baud rate. For good baud rate and min/max frequency settings see code.google.com/p/arms22/source/browse/trunk/SoftModem/SoftModem.h.
(
s.latency= 0.05;
s.waitForBoot{
SynthDef(\redFSKdecode, {|in= 20, thresh= 0.1, baudrate= 126, lo= 882, hi= 1764|
var sig= InFeedback.ar(in, 1);
var sigActive= Amplitude.ar(sig, 0.01, 0.01)>thresh;
var fre= 1/Timer.ar(sig*sigActive);
var trg= Schmidt.ar(fre, lo+(baudrate*0.5), hi-(baudrate*0.5)); //0= lo, 1= hi
var trgLo= trg<0.5;
var trgHi= 1-trgLo;
var trgCarr= Sweep.ar(trgHi, 1)>(1/baudrate*16); //when found more than 16bits high in a row
var trgData= SetResetFF.ar(trgLo*trgCarr, trgCarr);
var imp= Phasor.ar(trgData, baudrate/SampleRate.ir);
var writeTrg= (imp-Delay1.ar(imp))<0+Impulse.ar(0);
var writePos= PulseCount.ar(writeTrg, trgData);
var writeVal= Median.ar(31, trg);
var ok, done= 1-trgData;
var buf= LocalBuf(13).clear;
Demand.ar(writeTrg, 0, Dbufwr(writeVal, buf, writePos, 0));
ok= done*(1-Demand.ar(done, 0, Dbufrd(buf, 1, 0)))*Demand.ar(done, 0, Dbufrd(buf, 11, 0));
SendReply.ar(ok, '/data', Demand.ar(ok, 0, Dbufrd(buf, (2..9), 0)));
DC.ar(0);
}).add;
SynthDef(\redFSKencode, {|out= 0, amp= 0.6, minFreq= 4900, maxFreq= 7350, invBaudrate= 0.008|
var data= Control.names([\data]).ir(Array.fill(8, 0));
var env= EnvGen.ar(Env(#[1, 1, 0], [invBaudrate*(16+11), 0]), doneAction:2);
var parity= data.sum+1;
var freq= Duty.ar(Dseq([invBaudrate*16]++invBaudrate.dup(11)), 0, Dseq(#[1, 0]++data++[parity%2, 1]));
var src= SinOsc.ar(freq*(maxFreq-minFreq)+minFreq, 0, amp);
OffsetOut.ar(out, src*env);
}).add;
};
)
//test sending a simple counter
(
var baudrate= 126;
var lo= 882;
var hi= 1764;
OSCFunc({|msg|
var byte;
//("received:"+msg[3..]).postln;
byte= msg[3..].sum{|x, i| 2**i*x};
("received:"+byte).postln;
}, '/data');
Routine.run({
Synth(\redFSKdecode, [\in, 20]); //bus 20
inf.do{|i|
var byte= (i%256).asInteger;
var data= byte.asBinaryDigits.reverse;
s.bind{
("sending :"+byte).postln;
Synth(\redFSKencode, [\minFreq, lo, \maxFreq, hi, \data, data, \out, 20, \invBaudrate, 1/baudrate]); //bus 20
Synth(\redFSKencode, [\minFreq, lo, \maxFreq, hi, \data, data, \out, 0, \invBaudrate, 1/baudrate]); //monitor
};
(1/baudrate*(11+16)).wait;
};
})
)
//test a string of text
(
var baudrate= 126;
var lo= 882;
var hi= 1764;
OSCFunc({|msg|
var byte;
//("received:"+msg[3..]).postln;
byte= msg[3..].sum{|x, i| 2**i*x};
("received:"+byte.asInteger.asAscii).postln;
}, '/data');
Routine.run({
Synth(\redFSKdecode, [\in, 20]); //bus 20
"hello supercollider!".do{|x|
var byte= x.ascii.clip(0, 255);
var data= byte.asBinaryDigits.reverse;
s.bind{
//("sending :"+x+byte+data).postln;
Synth(\redFSKencode, [\minFreq, lo, \maxFreq, hi, \data, data, \out, 20, \invBaudrate, 1/baudrate]); //bus 20
Synth(\redFSKencode, [\minFreq, lo, \maxFreq, hi, \data, data, \out, 0, \invBaudrate, 1/baudrate]); //monitor
};
(1/baudrate*(11+16)).wait;
};
})
)
This FSK technique was used in many projects to control LEDs. e.g. most of the 3rd gen projects on RHYME are running SuperCollider on an iPod Touch with the 6 channels led brightness data being sent via FSK on one of the audio output channels.
Below some code for reading and parsing data from the Android app AndroSensor.
With this free app, you can record a lot of different sensors in your Android phone (like GPS, accelerometer, mic, battery, light etc) and save it to a comma-separated file (CSV). Later one can copy over the data file from the Android phone to a computer and read it in SuperCollider. the CSV files are normally stored on the SD card in a folder called AndroSensor.
By default, the app only saves and display data at slow update rates, so go into the AndroSensor's settings and change update interval to very fast and recording interval to for example 0.05 seconds (the fastest).
// https://play.google.com/store/apps/details?id=com.fivasim.androsensor
//--read the data - edit the path to your CSV file
(
var path= "~/Desktop/Sensor_record_20141018_115750_AndroSensor.csv"; //edit here
var data= CSVFileReader.read(path.standardizePath, delimiter:$;, startRow:1);
var data2= data.flop;
var dict= ();
data2.do{|x|
var key= x[0];
var val= x.copyRange(1, x.size-1);
while({key.last==Char.space or:{key.last==$:}}, {
key= key.copyRange(0, key.size-2);
});
if(val[0].any{|x| #[$:, $/].includes(x)}.not, {
val= val.asFloat; //make single numbers into floats
//}, { //else do nothing - keep date and satellites as strings
});
dict.put(key.asSymbol, val);
};
~dict= dict; //handle
)
//--list all stored keys...
~dict.keys.do{|x| x.postln}
//--access data stored at keys...
~dict['ACCELEROMETER X (m/s²)']
~dict['ACCELEROMETER Y (m/s²)']
~dict['ACCELEROMETER Z (m/s²)']
~dict['GRAVITY X (m/s²)']
~dict['GRAVITY Y (m/s²)']
~dict['GRAVITY Z (m/s²)']
~dict['GYROSCOPE X (rad/s)']
~dict['GYROSCOPE Y (rad/s)']
~dict['GYROSCOPE Z (rad/s)']
~dict['LIGHT (lux)']
~dict['MAGNETIC FIELD X (μT)']
~dict['MAGNETIC FIELD Y (μT)']
~dict['MAGNETIC FIELD Z (μT)']
~dict['ORIENTATION X (°)']
~dict['ORIENTATION Y (°)']
~dict['ORIENTATION Z (°)']
~dict['PROXIMITY (i)']
~dict['SOUND LEVEL (dB)']
~dict['LOCATION Latitude']
~dict['LOCATION Longitude']
~dict['LOCATION Altitude ( m)']
~dict['LOCATION Speed ( Kmh)']
~dict['LOCATION Accuracy ( m)']
~dict['Satellites in range'] //note as strings
~dict['Temperature (F)']
~dict['Level (%)']
~dict['Voltage (Volt)']
~dict['Time since start in ms'] //timestamps in milliseconds
~dict['YYYY-MO-DD HH-MI-SS_SSS'] //absolute timestamps - note as strings
//--plot the xyz accelerometer data...
(
[
~dict['ACCELEROMETER X (m/s²)'],
~dict['ACCELEROMETER Y (m/s²)'],
~dict['ACCELEROMETER Z (m/s²)']
].plot
)
//--plot the xyz orientation data...
(
[
~dict['ORIENTATION X (°)'],
~dict['ORIENTATION Y (°)'],
~dict['ORIENTATION Z (°)']
].plot
)
//--plot a lot of data (but not all)...
(
[
'ACCELEROMETER X (m/s²)',
'ACCELEROMETER Y (m/s²)',
'ACCELEROMETER Z (m/s²)',
'GRAVITY X (m/s²)',
'GRAVITY Y (m/s²)',
'GRAVITY Z (m/s²)',
'GYROSCOPE X (rad/s)',
'GYROSCOPE Y (rad/s)',
'GYROSCOPE Z (rad/s)',
'LIGHT (lux)',
'MAGNETIC FIELD X (μT)',
'MAGNETIC FIELD Y (μT)',
'MAGNETIC FIELD Z (μT)',
'ORIENTATION X (°)',
'ORIENTATION Y (°)',
'ORIENTATION Z (°)',
'SOUND LEVEL (dB)'
].collect{|x| ~dict[x]}.plot;
)
//--sound example mapping accelerometer to simple sound
(
s.waitForBoot{
var a= {|freq= 500, amp= 0, pan= 0| Pan2.ar(Pulse.ar(freq.lag(0.25), 0.2, amp.lag(0.25)), pan.lag(0.25))}.play;
s.sync;
Routine.run({
var prevTime= 0;
~dict['Time since start in ms'].do{|x, i|
a.set(
\freq, ~dict['ACCELEROMETER Y (m/s²)'][i].linexp(-20, 20, 100, 1000),
\amp, ~dict['ACCELEROMETER Z (m/s²)'][i].linlin(-20, 20, 0, 1),
\pan, ~dict['ACCELEROMETER X (m/s²)'][i].linlin(-20, 20, -1, 1)
);
(x-prevTime*0.001).wait;
prevTime= x;
};
"done".postln;
a.release;
});
};
)
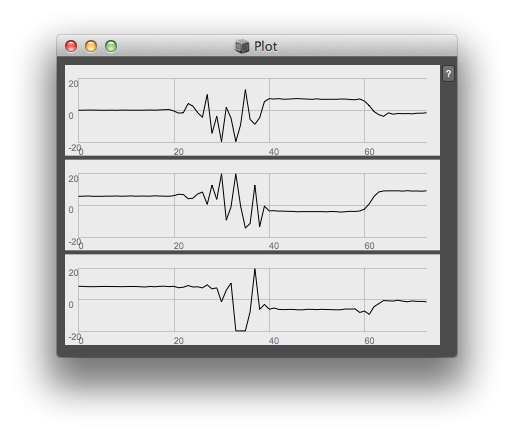
Attached below is a demo CSV file of me first keeping the phone still, and then shaking it a bit + turning it around. The data recording is only about eight seconds long.
If you plot for example the 3D accelerometer data it will look like this...
Today a very simple piece of code that takes whatever you're typing in a document and posts it back 2 seconds later. See it as a demonstration. The list is treated as a FIFO buffer.
Note: only works in SuperCollider versions with Document support (not 3.6, but 3.4, 3.5, 3.7...)
(
var delay= 2; //post 2 seconds later
var l= List.new;
//--record in list l
Document.current.keyDownAction= {|doc, key|
l.addFirst(
(key: key, time: Main.elapsedTime)
);
};
//--playback of list l
Routine({
inf.do{
var now= Main.elapsedTime;
if(l.size>0 and:{now-delay>l.last.time}, {
l.pop.postln;
});
0.01.wait;
};
}).play;
)